Wednesday, Pengcheng Li “Memory management optimization using all-window liveness”
Thurday, Jacob Brock, “Locality theory in shared cache and beyond”
Friday, Rahman Lavaee, “Hierarchical memory layout: theory and optimization”



Wednesday, Pengcheng Li “Memory management optimization using all-window liveness”
Thurday, Jacob Brock, “Locality theory in shared cache and beyond”
Friday, Rahman Lavaee, “Hierarchical memory layout: theory and optimization”
Optimal Multiprogramming
Denning, Kahn, Leroudier, Potier, Suri
In this paper, the authors give three memory-based techniques for maximizing throughput in a multiprogrammed system. “n” is the number of processes sharing processor time, or the “load”, and T(n) is the throughput.
First they develop a model for their system.
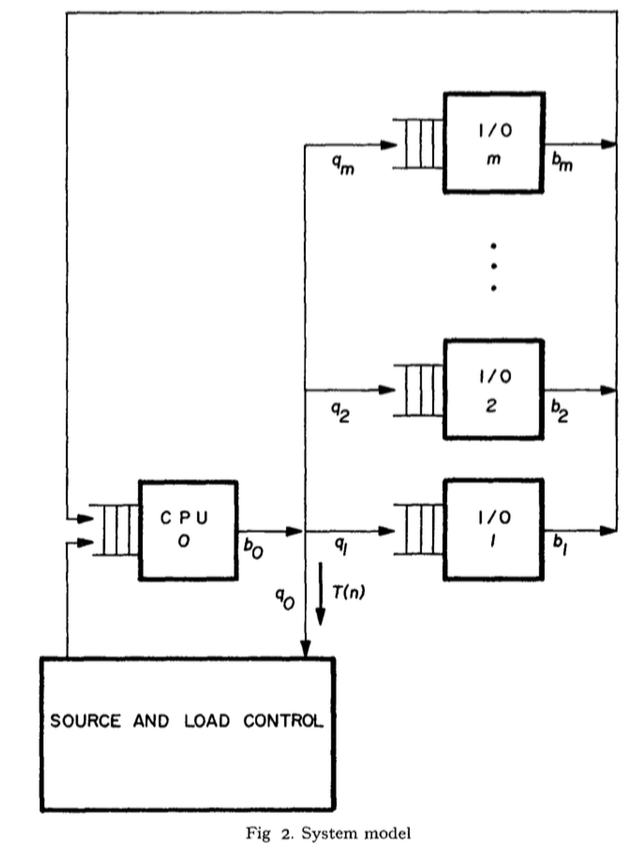
a_i is the request rate for station i, and b_i is the service completion rate for station i. q_i is the fraction of departures from the processor that go to station i (q_0 is a departure). Station 1 is the paging device, so the page swap time is 1/b_1.
A couple of relationships:
b_0 = a_0 + … + a_m (there are m stations)
L(n) = 1/a_1 (system lifetime is average time between page faults)
q_i = a_i/b_0 (by definition, access rate at i / completion rate of processor)
T_i(n) is the throughput at station i. T(n) = T_0*q_0 (output rate of processor * fraction of that that leaves system).
“Three Load Control Rules”
————————–
(1) The Knee Criterion
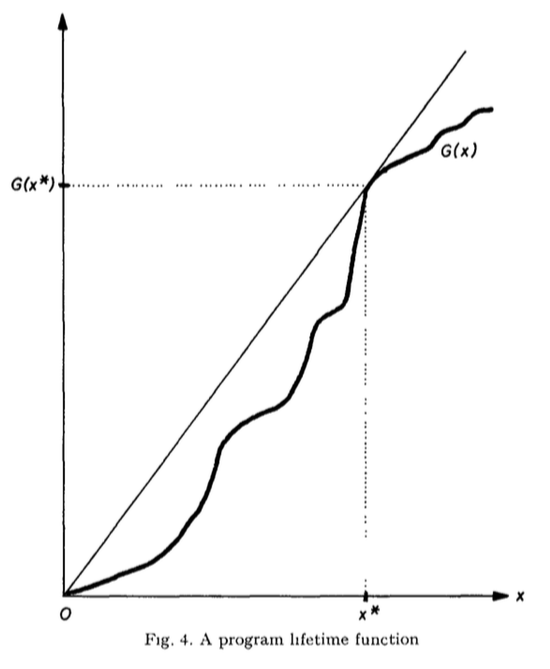
– Throughput is maximized when memory space-time per job is minimized. In a lifetime curve, the knee is the point that minimizes the memory space-time due to paging. This can be done by managing the memory so that the sum of working set sizes is near the knee.
(2) L = S Criterion
– L is system lifetime, and S is swap time. When the lifetime (time between page faults) is greater than the swap time (time to satisfy a page fault), this prevents queueing at the paging device, which would make it a bottleneck. This rule can be enforced by management of the memory, or by management of the load.
(3) 50% Criterion
– The idea here is to keep the paging device busy between 50% and 60% of the time. This can be enforced by managing the load.
Background. Multicore applications share cache. Composable analysis is needed to see how programs interact with dynamic, usage based cache management. Miss ratio/rate doesn’t compose.
Xiaoya’s work. Footprint composes but assumes uniform interleaving.
Jake et al. Common logical time in CCGrid 2015 handles non-equal length component traces, eg. one thread accesses memory 100 times more frequent than another thread. But we still assume uniform interleaving.
Hao repots several advances.
Time-preserving decomposition
Now we can compose threads that have any type of interleaving.
Cache associativity modeling
The Smith method is the dominant solution for nearly 40 years but assumes equal probability of access in all cache sets. Hao’s new solution removes this assumption and uses time-preserving decomposition to also allow non uniform interleaving.
GPU texture cache
Modeled as a sector cache to give composable performance for all cache sizes and associativity as for normal cache.
New studies
Space efficient algorithms for shared footprint analysis.
Possibly memcached or io traces.
Static locality analysis.
Locality aware scheduling

At the 2015 University Day organized in the Systems workshop organized by Wang Chen at IBM Toronto, José Nelson Amaral of University Alberta gave a talk explaining the following studies. The problem is estimating the size of a tree by traversing some but not all nodes.
“Mathematics of computation” by Donald Knuth in American Mathematical Society 1975 gave a sampling solution: Go down random tree paths to the leaves, and take the average of the sampled sub-tree size as the actual average sub-tree size.
Heuristic sampling by Peng Chen in 1992 takes samples but reuses the past results. It uses the term Stratification but the technique sounds like memoization. An example is the Fibonacci series.
The Alberta work is to estimate the number of leaf tasks in a recursive fork-join (Cilk) program. The solution is a complete exploration of the top of the tree until it has the nodes 10 times the number of processors. Then it uses the Knuth method to estimate the size of a sub-tree.
Another example is 3×3 puzzle, 181,440 states and 4×4, more than 10^13 states.
Currently GPU has a thread-centric model, where a task is the work specified by kernel(thread block ID). There two important questions: When to schedule, which software can control through persistent threads, and where to schedule, which is the problem studied in this paper. It groups tasks that share data.
Task co-location is important for locality and for resource utilization. Improper concurrent execution of kernels leads to resource conflicts, e.g. too much shared memory/register demand so another kernel cannot be run.
The solution is SM centric. A worker is started by hardware to run tasks from a queue, controlled by software. The paper has a scheme to start the same number of workers on each SM. In comparison, the past work on persistent threads can only run one worker per SM.
For irregular application, the paper uses GPU to parallel partition the data/tasks into locality groups.
Measured the effect in Co-run ANTT speedup = mean( default Ti / opt Ti), (average normalized turnaround time) and Co-run throughput.
Adriaens+:HPCA12’s study of co-run kernels.
John Mellor-Crummey from Rice University investigated data and computation reordering to improve memory performance for applications with irregular memory accesses.
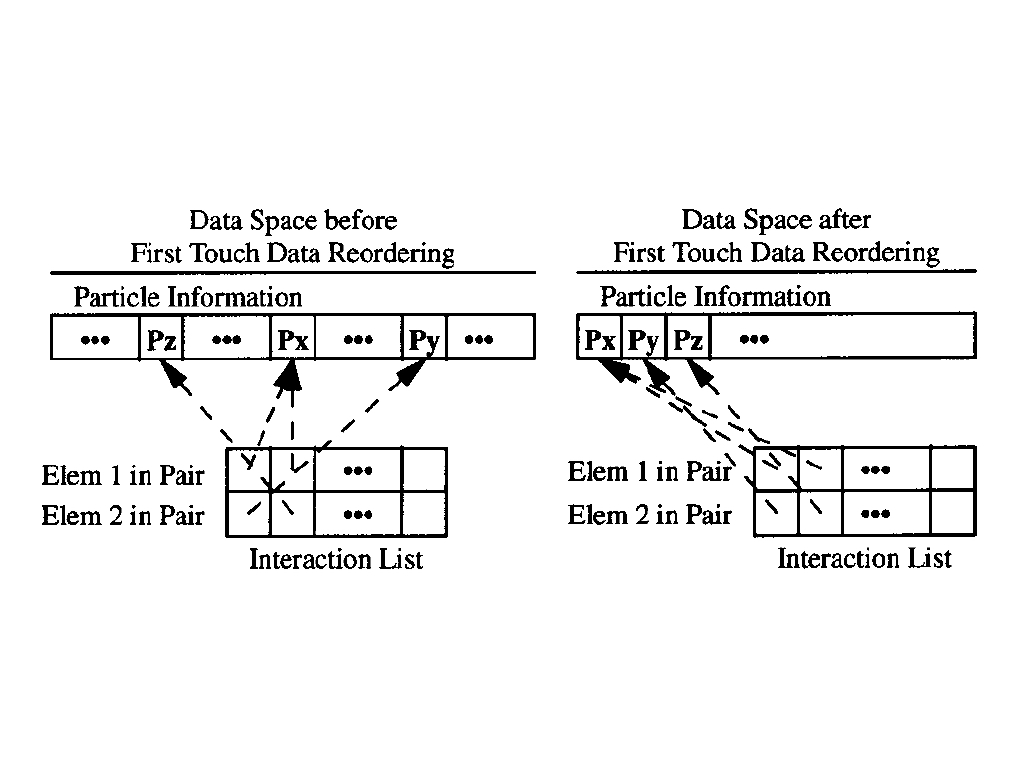
For regular memory accesses, the gap between CPU and memory can be well bridged by loop blocking and prefetching. but for irregular memory accesses, the accesses can only be known during the run time. One approach to improve memory performance is to dynamically reorder data before time consuming computations. And also, computation reordering along with data reordering will be much more effective. The reason why the data and computation reordering can be effective is that they increase the probability that data in the same block will be access closely in time and the probability that data will be reused before the block is elected.
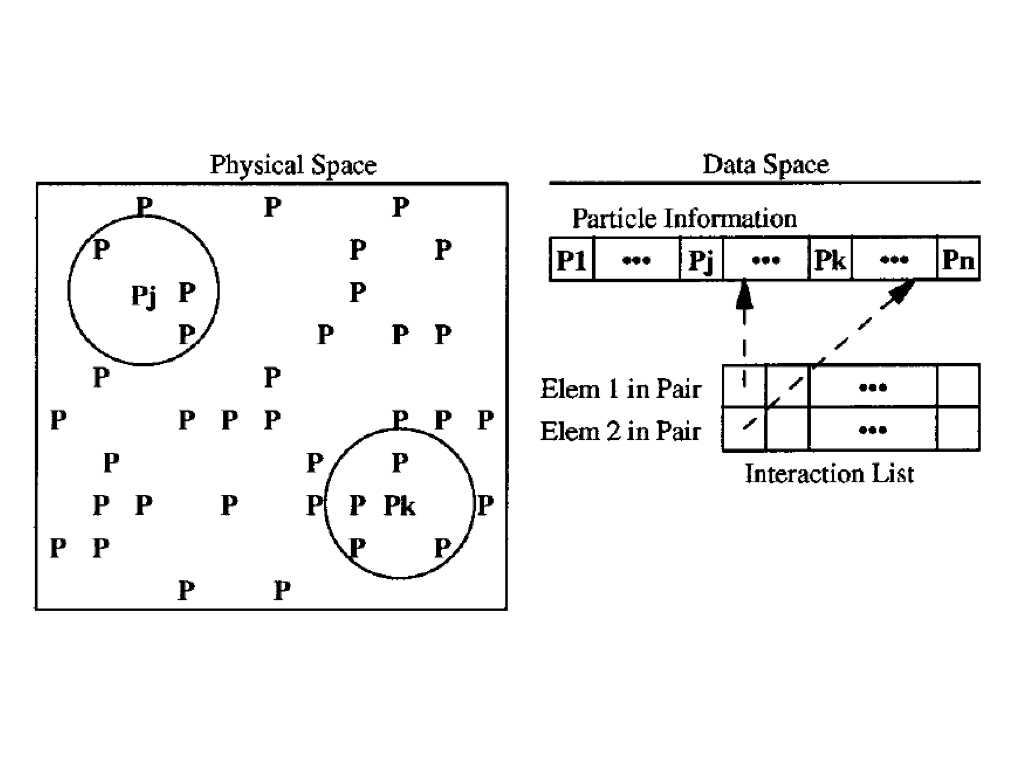
For example, N-body is a classical irregular application which is used to calculate the interaction between particles. It contains two list, one stores the information of each particles and the other stores the paired indices of particles which will interact with each other.
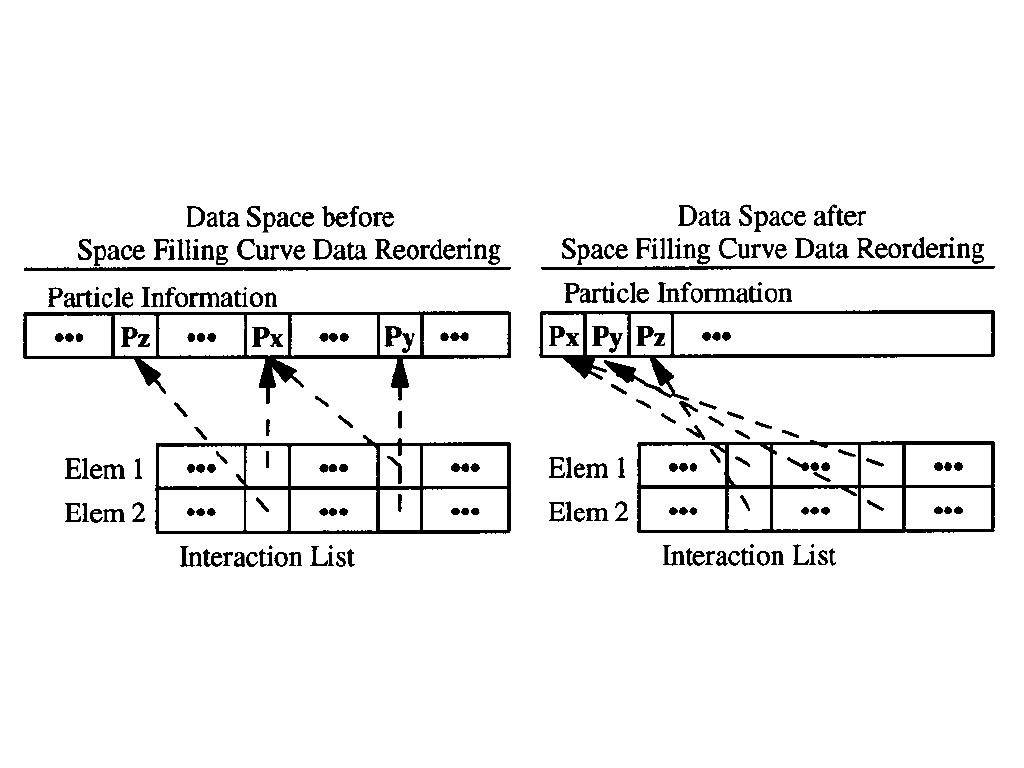
Data reordering can increase spacial locality by placing the data near one another by the accessed order. Two data reordering approaches are proposed:
First Touch Data Reordering(FTDR): before computation, a linear scan will be performed on the interaction list to get the new order for particle list.
Space Filling Curve Data Reordering(SFCDR): before computation, reordering the particle list by space filling curve which make the particles with shorter distance in space close with each other. And one advantage compared with FTDR, the space filling cure reordering can be performed without knowing the order of the computation.
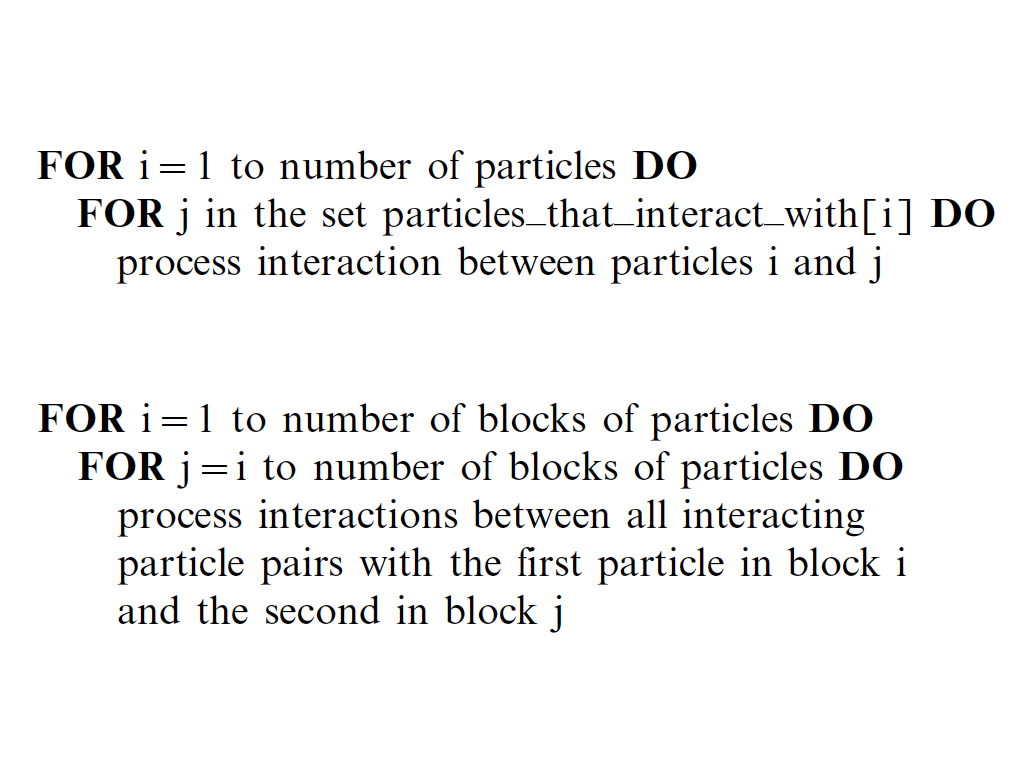
Computational reordering can improve spacial locality as data reordering and also improve temporal locality. Two computational reordering are proposed:
Space Filling Curve Computation Reordering(SFCCR): reorder the computations according to space filling curve, and the particle list maintains the same.
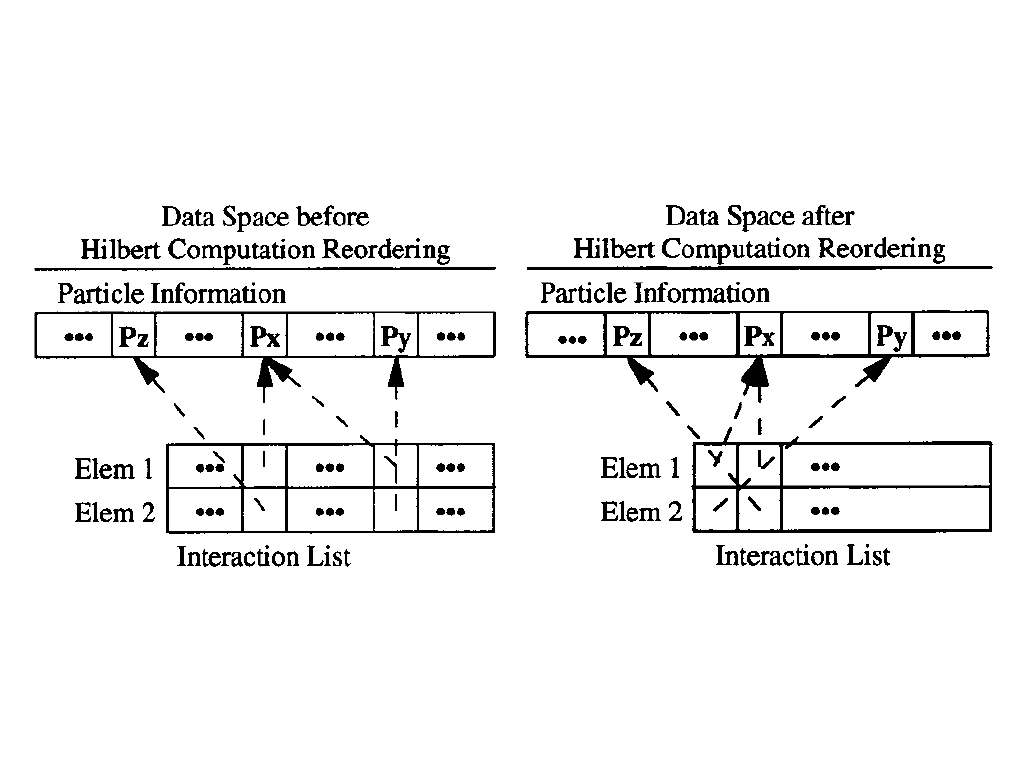
Computational Reordering by Blocking(CRB): Before reordering the computations, data should be given a block index (the index can be more than one dimension), then reorder the computations according to the block number which the particles belongs to the same block will be processed together.
[FAST15]Carl A. Waldspurger, Nohhyun Park, Alexander Garthwaite, and Irfan Ahmad, CloudPhysics, Inc.
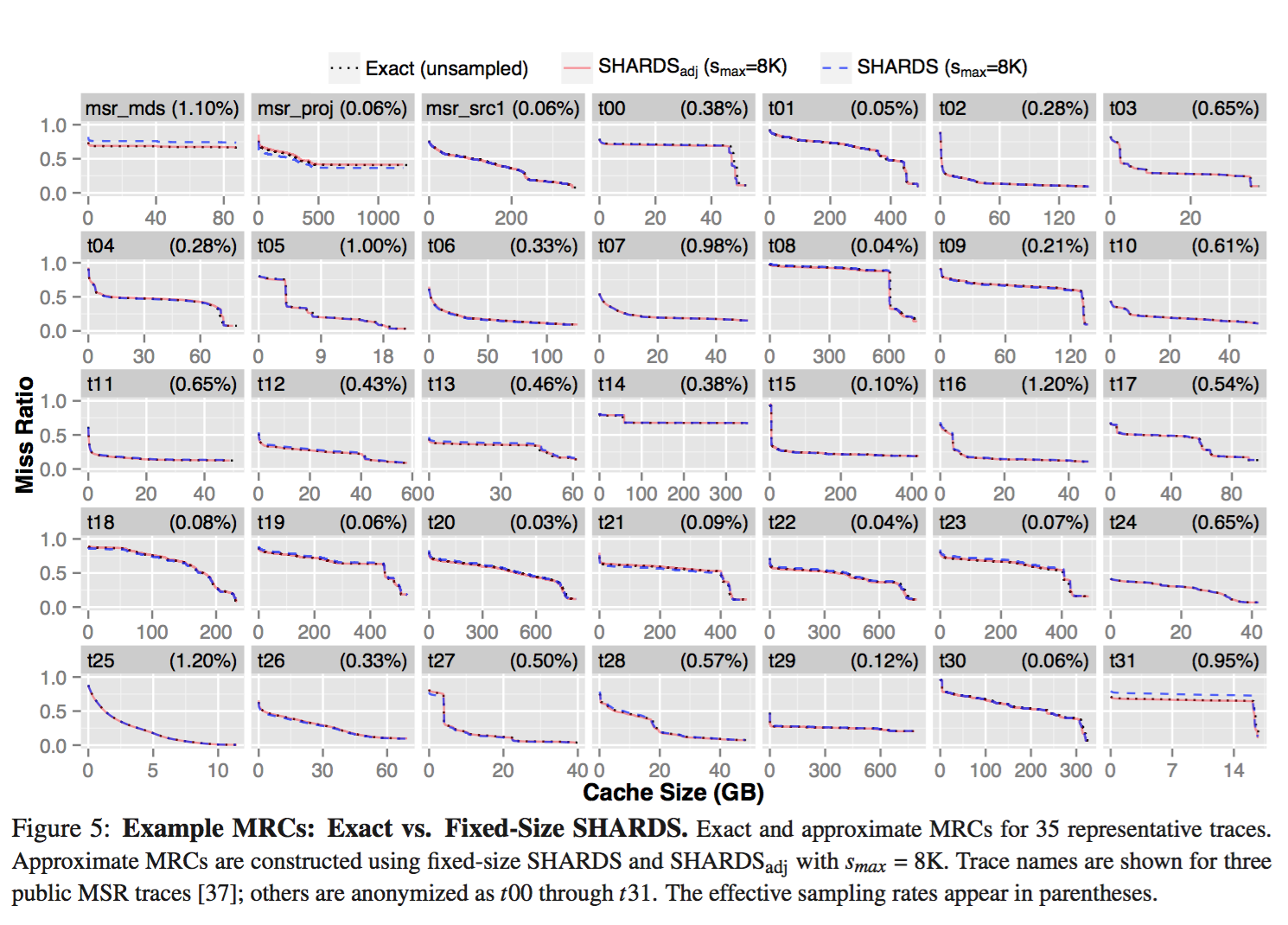
This paper proposed a sampling based miss ratio curve construction approach. It focus on reducing memory complexity of other algorithms from linear to constant.
Evaluation on commercial disk IO traces show it has a high accuracy with a low overhead.
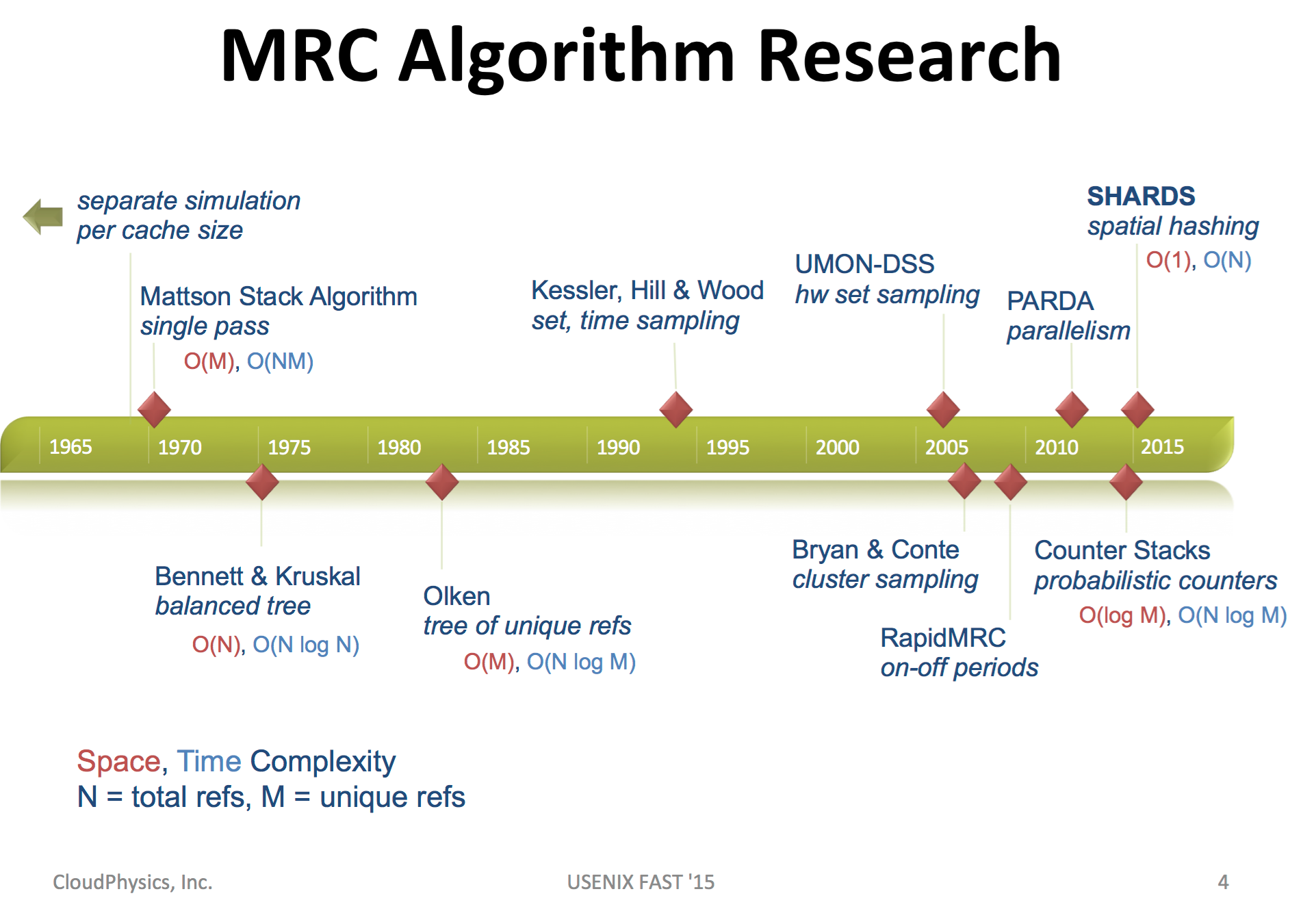
Algorithms for exact miss ratio curve usually consume a huge amount of memory, which is linear to unique reference(counted as M). Thus when M becomes dramatically huge, the memory overhead becomes a big problem. In this paper, authors analyzed VMware virtual disk IO data which is collected from commercial cloud, the size of disks are from 8GB to 34TB, with a median of 90GB. This size reflects range of M.
Thus authors propose a two phases spatial sampling algorithm to reduce space complexity, including sampling on address and an algorithm to restrict size of sampling.
The algorithm contains 3 steps:
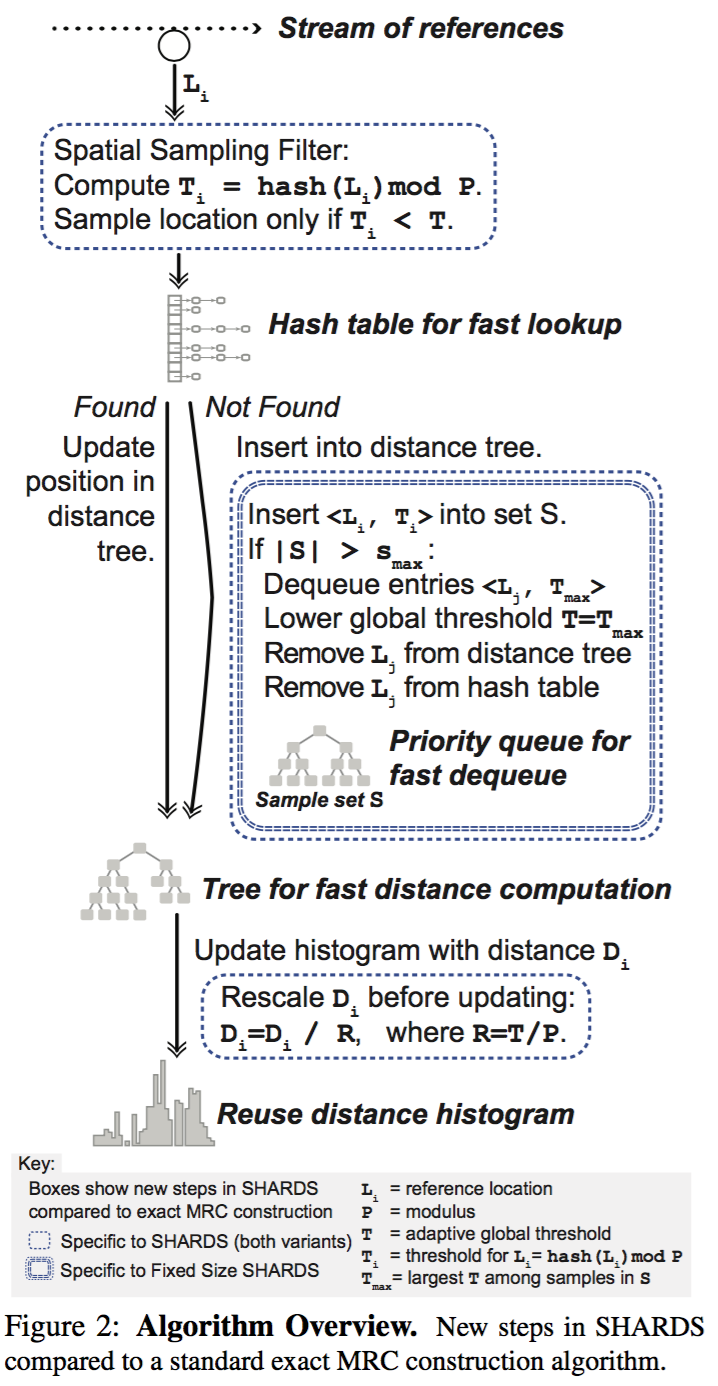
For each address L, if hash(L) mod P < T, then this address is sampled. Thus sampling rate R = T/P.
Space complexity becomes M*R, and the objective is maximize R while M*R is less than specific boundary. But it is difficult to predicate M at runtime, thus it might not be a good decision to fix R at beginning of execution. Which means, it is necessary to adjust R at runtime, aka, decreasing R.
The approach is keeping a set S, which keeps all sampled values and their hash values, say for each address L[i], remember (L[i],T[i]). If |S| > S_max, then keep removing the one whom has maximal T[i] until |S| equal to S_max, and always let sampling boundary T = max(T[i]), where L[i] belong to S.
Reuse distance is computed with traditional approach, such as splay tree.
Since addresses space is sampled with rate R, thus the reuse distance is also scaled by R. For example, if distance d is gained through sampling, then before accumulating the histogram, d should be scaled to d/R.
Furthermore, since T will be adjusted according to previous section, and R = T/P, which means R will be adjusted at runtime, thus each time R is changed, the histogram should be rescaling again. In detail, all distance of the histogram should be multiplied by R_new/R_old.
Data is collected by SaaS caching analytics service which “is designed to collect block I/O traces for VMware virtual disks in customer data centers running the VMware ESXi hypervisor”. “A user-mode application, deployed on each ESXi host, coordinates with the standard VMware vscsiStats utility [1] to collect complete block I/O traces for VM virtual disks.” In addition, the data is composed of 16KB sized block, and cached with LRU algorithm.
Comes from Waldspurger etc. ‘s slides
“Use of sampling periods allows for accurate measure- ments of reuse distances within a sample period. How- ever, Zhong and Chang [71] and Schuff et al. [45, 44] ob- serve that naively sampling every Nth reference as Berg et al. do or using simple sampling phases causes a bias against the tracking of longer reuse distances. Both ef- forts address this bias by sampling references during a sampling period and then following their next accesses across subsequent sampling and non-sampling phases.”
Modern hardware counters are used to find program instructions that cause most cache misses for example, and the way is to measure how many times a counter overflow happens on a particular instruction. However, when an overflow happens as an interrupt, the exact instruction causing the interrupt may be incorrect, a problem that Intel calls a “skid”.
The solution is to consider surrounding instructions as the set of probabilities. Then the overlap of these probabilities will show the most likely instruction.
The problem and solution are hardware dependent.
To model performance, it is necessary to quantify the tradeoff between computation and communication, in particular, between the processing throughput and the data transfer bandwidth. The classic model is the notion called balance by Callahan, Cocke and Kennedy [JPDC 1988]. A balance is the ratio between the peak computing throughput and the peak data transfer bandwidth. It is known in the multicore era as the roofline model [Williams et al. CACM09] and has been known since earlier times as byte per flop.
If a machine is not balanced because the memory is not fast enough, a processor can achieve at most a fraction of its peak performance.
Both a program and a machine have balance. Program balance is the amount of the memory transfer, including both reads (misses) and writes (writebacks) that the program needs for each computation operation; machine balance is the amount of memory transfer that the machine provides for each machine operation at the peak throughput. Specifically, for a scientific program, the program balance is the average number of bytes that must be transferred per floating-point operation (flop) in the program; the machine balance is the number of bytes the machine can transfer per flop in its peak flop rate.
On machines with multiple levels of intermediate memory, the balance includes the data transfer between all adjacent levels [Ding and Kennedy, IPDPS00].
The paper tests the performance of two simple loops on SGI Origin2000 and HP/Convex Exemplar. The first loop takes twice as long because it writes the array to memory and consequently consumes twice as much memory bandwidth.
double precision A[2000000]
for i=1 to N
A[i] = A[i]+0.4
end for
for i=1 to N
sum = sum+A[i]
end for
The paper shows the balance on an SGI Origin2000 machine. For example, convolution requires transferring 6.4 bytes between the level-one cache (L1) and registers, 5.1 bytes between L1 and the level-two cache (L2), and 5.2 bytes between L2 and memory. For each flop at its peak performance, the machine can transfer 4 bytes between registers and cache, 4 bytes between L1 and L2, but merely 0.8 bytes between cache and memory. The greatest bottleneck is the memory bandwidth, the ratio 0.8/5.2 = 0.15 means that the CPU utilization is at most 15%. Note that prefetching cannot alleviate the bandwidth problem because it does not reduce the aggregate volume of data transfer from memory. In fact, it often aggravates the bandwidth problem by generating unnecessary prefetches.
Our earlier work has studied loop fusion and array regrouping [Ding and Kennedy, JPDC 2004] and run-time computation reordering and consecutive packing (data reordering) [Ding and Kennedy, PLDI 1999] to reduce the total bandwidth requirement of a program. There are excellent follow up studies, which would be good to review later.
From the above discussion, we know meta-data design matters much with spacial locality. In order to improve spacial locality, vam [FengB:MSP05] allocator moved object headers, i.e. meta-data, to the headers of pages where objects are stored. streamflow [Schneider+:ISMM06] allocator also removed object headers, but stored the meta-data globally in separate space like tcmalloc does. In addition to meta-data, a few other papers tried to explore locality in other ways. Streamflow [Schneider+:ISMM06] allocator favored locality transparently from three folds. First, it favored temporal locality by using LIFO free lists. Second, spacial locality is favored by removing object headers. Last, contiguous allocation within pages in physical memory helped to reduce cache misses, page fault rate and TLB misses, since continuous layout reduces self-interference within a page block and cross-interference (between page blocks) in the cache. Cache-conscious data layout is developed by streamflow for the first time at the user level. To achieve the locality purpose, however, streamflow uses atomics or locks for synchronizations in five design details, which slow down programs much. In particular, three out of five are in critical path. In fact, the meta-data management in streamflow is quite like tcmalloc does. Julia [JulaR:ISMM09] used automatic hints from C++ STL library to improve an application’s spacial locality suppose the target application is using C++ STL library. For example, the parent’s address is used as a hint when allocating a node in a tree. For another instance, the previous element’s address is used as a hint when allocating an element in a list. Provided with hints, Julia defined locality accuracy as the distance in the virtual address space between the hint and the returned object, which actually reflects “closeness” in spacial locality. By dividing pages into regions in a “closeness” scope, the allocator always tried to return an object in the same region with the hint to achieve the locality accuracy. Julia only enhanced spacial locality of applications using C++ STL library. For those applications not using C++ STL library, Julia’s method is not a fit. Pool allocation [Lattner+:PLDI05] incorporates heap objects with the same data structure into the same pool in order to purse a good cache locality. Lattner [Lattner+:PLDI05] analyzed data types of heap slots at compile-time and allocate the heap objects with the same data type in the same pool. To prevent the disambiguity and inaccuracy of compile-time analysis, Wang et al. [Wang+:CGO10] proposed dynamic pool allocation to improve spacial locality of heap objects at runtime by keeping track of affinity of heap objects of the same data structure, which certainly incurs much performance overhead.
